| المجموعات الإجتماعية |
| البحث |
| مشاركات اليوم |


القائمة
| قسم الطيران اللاسلكي AIRCRAFT R/C مناقشات عامه تجارب ودروس تقارير استفسارات راجع فهرس القسم قبل طرح موضوعك >> فهرس قسم الريموت |
| موضوع مغلق |
|
|
أدوات الموضوع |
| قسم الطيران اللاسلكي AIRCRAFT R/C مناقشات عامه تجارب ودروس تقارير استفسارات راجع فهرس القسم قبل طرح موضوعك >> فهرس قسم الريموت |
| موضوع مغلق |
|
|
أدوات الموضوع |
 20-10-2009,
08:54 PM
20-10-2009,
08:54 PM
|
مشاركة [ 1 ] | ||
|
|||
|
|
بسم الله الرحمن الرحيم
السلام عليكم انا اخوكم محمد الامين وحابب اتشارك معكم فى دائرة الكترونية قمت بتصميمها قبل شهور وهى عبارة عن wireless Real time control system 10 قنوات 6 سيرفو و 2 اكتشويترز و 2 bus switches *  الهدف من هذا المشروع هو تصميم نظام تحكم عن بعد بسيط وفعال وقابل لتشغيل مختلف تطبيقات قيادة الانظمة غير المهأهولة سواء كانت روبوتات او قوارب مراقبة او الطارات بدون طيار 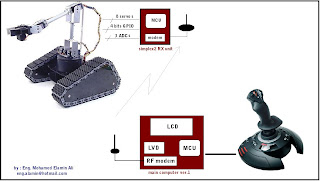  ] ]ينقسم النظام الى وحدتين اساسيتين هما 1- الكمبيوتر الرئيسى (وحدة القيادة)  وهى مكونة من عصى تحكم من نوع اتاك3 (معدلة ) و وحدة معالجة الاوامر وهى فى الاساس تتكون من المتحكم الدقيق pic18f4550 ووحدة ادارة الطاقة وشاشة صغيرة يمكن ظبط وبرمجة الكمبيوتر على حسب متطلبات النظام مثل تحديد سرعة السيرفوهات واتجاهاتها واقصى زواية   يتميز هذه النظام عن غيرة من الانظمة اللاسلكية بعدم السماح للاشارات التى تعمل على نفس التردد بالتداخل وايضا بخوارزميات اضافية تجعل المعالج ينفز اوامر خاصة عند انقطاع الاشارة مثل فتح المظلة فى حال الطائرات بدون طيار و اغلاق المحرك فى حالة الروبوتات والقوارب اللاسلكية لتجنب عملية الخروج عن السيطرة  صورة تصميم اللوحة الالكترونية لوحدة القيادة 2- وحدة التحكم المدمج وهى عبارة عن دائرة الكتروينة تثبت على الروبوت او على الطائرة ومهمتها استقبال الاشارة اللاسلكية المرسلة عن طريق وحدة القيادة وتحليلها وتنفيز الاوامر مثل تحريك السيرفوهات او الالكتشويترز او غيرها من الانظمة الالكتروميكانيكية يوجد المزيد من الصور سوف اقوم برفها قريبا ============================== مواصفات النظام 1- تردد العمل 433.525 بقدرة 13 ملى واط نطاق التغطية 1 كيلو ميتر mono dipole 5 كيلو ميتر with yagi antenna 2- نمط التعديل هو الاغلاق بازاحة التردد 3- استهلاك الطاقة 100 ملى امبير بالنسبلة لوحدة القيادة او 30 -400 ملى امبير بالنسبة لوحدة التحكم المدمج 4- التاخير الزمنى بين عضى التحكم وتنفيز الامر 1 ملى ثانية (تقريبا لايوجد تاخير) تقبلوا تحياتى اخوكم محمد الامين |
||

|
|
21-10-2009,
09:16 AM
|
مشاركة [ 2 ] | ||
|
|||
|
|
ممتاز أخي
شيئ رائع بالفعل لكن ممكن تقول لي الدارة انت قد استخدمت فيها سبيد كونترول جاهز ام صممته ايضاً لكني استغرب من انك تقول 13 ملي واط يصل الى 1 كم مع العلم انه لدي دارة ارسال 1 واط وصل مداها الى 600 متر تقريباً شيئ آخر الصور لم تظهر |
||
|
|
|
21-10-2009,
01:22 PM
|
مشاركة [ 3 ] | ||
|
|||
|
|
اولا احب اشكرك على ردك اخوى
sskk77
ممتاز أخي شيئ رائع بالفعل لكن ممكن تقول لي الدارة انت قد استخدمت فيها سبيد كونترول جاهز ام صممته ايضاً لكني استغرب من انك تقول 13 ملي واط يصل الى 1 كم مع العلم انه لدي دارة ارسال 1 واط وصل مداها الى 600 متر تقريباً شيئ آخر الصور لم تظهر بالنسبة للاسبيد كنترولر فهو لايختلف عن السيرفو فى بروتوكول التحكم بمعنى انك يمكن اضافت سبيد كنترولر فى اى قناة من قنوات السيرفو السته يتناسب مع مواصفات الموتور المستخدم لم اصمم built in ESC ---------------------------------------------------- فيما يتعلق بدائرة الارسال والمدى فهو يختلف بالطبع من دائرة الى اخرى وتوجد عوامل كثيرة تتحكم فى نطاق الارسال مثل نوع الهوائى المستخدم ونوع القناة المستخدمة ومعدل الضجيج فى القناة ونوع التعديل المستخدم وكفاءة الهاردوير فى حد ذاتها ونوع البيانات المرسلة ----------------------------------------------------- انا مستخدم digital data transmitter module 13mW FSK modulation 433 / 343 mhz المدى المكتوب فى الداتا شيت 1000متر لاين اوف سايت انا استقبل اشارة حتى 1300 متر لاين اوف سايت بهوائى من نوع مونو دايبول ------------------------------------------------- فى نفس الوقت اذا كان عندك فيديو ترانسميتر 500mW بتجد انو المدى مابيتعدى ال 300 متر تقريبا وذلك لاسباب كثيرة واهما مايعرف بمعدل الضجيج بالنسبة للاشارة المرسلة signal to noise ratio -------------------------------------------------- نفس الامر ينطبق على مايعرف باشارة ال fm/ppm وهى مستخدمة فى كثير من اجهزة الارسال للهواء بتجد قدرة الارسال تتراوح بين 600mW و 1.5mW والمدى يتراوح بين 400 متر الى 900 متر وسهل جدا تعمل jamming للاشارة اذا استخدمت نفس التردد ---------------------------------------------------- بالنسبة للصور فسوف اعيد رفعها على سيرفر اخر  صورة العينة الاولية للنظام ----------------------------  الكمبيوتر الرئيسى اثناء الاختبار ------------------------  اللوحة الالكترونية للكمبيوتر الرئيسى -------------------------  وحدة التحكم المدمج  شكل جهاز التحكم |
||
|
|
|
21-10-2009,
02:03 PM
|
مشاركة [ 4 ] | ||
|
|||
|
|
اولا احب اشكرك على ردك اخوى sskk77 بالنسبة للاسبيد كنترولر فهو لايختلف عن السيرفو فى بروتوكول التحكم بمعنى انك يمكن اضافت سبيد كنترولر فى اى قناة من قنوات السيرفو السته يتناسب مع مواصفات الموتور المستخدم لم اصمم built in ESC ---------------------------------------------------- فيما يتعلق بدائرة الارسال والمدى فهو يختلف بالطبع من دائرة الى اخرى وتوجد عوامل كثيرة تتحكم فى نطاق الارسال مثل نوع الهوائى المستخدم ونوع القناة المستخدمة ومعدل الضجيج فى القناة ونوع التعديل المستخدم وكفاءة الهاردوير فى حد ذاتها ونوع البيانات المرسلة ----------------------------------------------------- انا مستخدم digital data transmitter module 13mW FSK modulation 433 / 343 mhz المدى المكتوب فى الداتا شيت 1000متر لاين اوف سايت انا استقبل اشارة حتى 1300 متر لاين اوف سايت بهوائى من نوع مونو دايبول ------------------------------------------------- فى نفس الوقت اذا كان عندك فيديو ترانسميتر 500mW بتجد انو المدى مابيتعدى ال 300 متر تقريبا وذلك لاسباب كثيرة واهما مايعرف بمعدل الضجيج بالنسبة للاشارة المرسلة signal to noise ratio -------------------------------------------------- نفس الامر ينطبق على مايعرف باشارة ال fm/ppm وهى مستخدمة فى كثير من اجهزة الارسال للهواء بتجد قدرة الارسال تتراوح بين 600mW و 1.5mW والمدى يتراوح بين 400 متر الى 900 متر وسهل جدا تعمل jamming للاشارة اذا استخدمت نفس التردد ---------------------------------------------------- بالنسبة للصور فسوف اعيد رفعها على سيرفر اخر صورة العينة الاولية للنظام ---------------------------- الكمبيوتر الرئيسى اثناء الاختبار ------------------------ اللوحة الالكترونية للكمبيوتر الرئيسى ------------------------- وحدة التحكم المدمج شكل جهاز التحكم طيب أخي ممكن تساعدني بالتحكم بالسبيد كونترول اقصد عن الاشارة المطبقة على المدخل للتحكم بالسبيد كنترول علماً أن قد جربت دارة تعمل مع السيرفو بشكل جيد لكنها لم تعمل مع السبيد كونترول واذا ممكن تضع الكود الخاص بالمعالج في دارتك لأني قد صممت دارة لريموت وقد عملت جيداً مع السيرفوات لكنها لم تعمل مع السبيد كونترول ولك فائق الاحترام والتقدير |
||
|
|
|
21-10-2009,
02:23 PM
|
مشاركة [ 5 ] | |||
|
||||
|
|
اخي العزيز ... فكرة رائعة ومميزة بس ممكن تعطينا التصميم او المواد التي تستخدم في صنع الدارة.
وشكرا |
|||
|
|
|
21-10-2009,
03:50 PM
|
مشاركة [ 6 ] | ||
|
|||
|
|
الصور لا تظهر عندي ومشكورررررررررررر
|
||
|
|
|
21-10-2009,
05:26 PM
|
مشاركة [ 7 ] | ||
|
|||
|
|
طيب أخي ممكن تساعدني بالتحكم بالسبيد كونترول اقصد عن الاشارة المطبقة على المدخل للتحكم بالسبيد كنترول علماً أن قد جربت دارة تعمل مع السيرفو بشكل جيد لكنها لم تعمل مع السبيد كونترول واذا ممكن تضع الكود الخاص بالمعالج في دارتك لأني قد صممت دارة لريموت وقد عملت جيداً مع السيرفوات لكنها لم تعمل مع السبيد كونترول ولك فائق الاحترام والتقدير مانوع الاسبيد كنترولر الزى تستخدمة ؟؟ مانوع المايكروكنترولر الذى تجيد التعامل معة ؟ هل عندما صممت الدائرة كانت السيرفوهات ثابتة فى الحركة ام مهتزة ؟ لان معظم الاسبيد كنترولر ماتقبل الاشارة الغير ثابتة وماتشتغل اذا كانت اشارة التحكم لها عرض نبضة اكبر من 1 ملى ثانية عند بداء التشغيل باعتبار ان عصى الثروتيل مرفوعة الكود التالى هو كود لقيادة 8 سيرفوهات عن طريق المعالج pic16f77a يستم استقبال القيم عن طريق منفز ار اس 232 للمايكرو الكود مكتوب بلغة البيك بيزك برو دا تقريبا اول كود اكتبه متعلق بقيادة السيرفوهات كود:
'****************************************************************
'* Name : UNTITLED.BAS *
'* Author : [eng . Mohammad Alamin Ali] *
'* Notice : Copyright (c) 2008 [select VIEW...EDITOR OPTIONS] *
'* : All Rights Reserved *
'* Date : 1/23/2008 *
'* Version : 1.0 *
'* Notes : *
'* : *
'****************************************************************
define osc 12
include "modedefs.bas"
value var byte
angle var byte
d var byte [16]
trisd = $00
' INTCON = %00100001
' OPTION_REG = %11100000
' TMR0 = 0
' on interrupt goto ISR
' INTCON = %11000000
main:
serin2 portc.1 , 84 , [WAIT($A6 ,$41), str d\16 ]
' if d[0] = $C6 then
portd = d[9]
'servo1:
if d[1] > 127 then
angle = d[1] - 128
high portb.0
pauseus 1500 + angle*4
low portb.0
endif
if d[1] < 128 then
angle = 127 - d[1]
high portb.0
pauseus 1500 - angle * 4
low portb.0
endif
''''''''''''''''servo2
'servo2:
if d[2] > 127 then
angle = d[2] - 128
high portb.1
pauseus 1500 + angle*4
low portb.1
endif
if d[2] < 128 then
angle = 127 - d[2]
high portb.1
pauseus 1500 - angle * 4
low portb.1
endif
''''''''''''''''servo3
'servo3:
if d[3] > 127 then
angle = d[3] - 128
high portb.2
pauseus 1500 + angle*4
low portb.2
endif
if d[3] < 128 then
angle = 127 - d[3]
high portb.2
pauseus 1500 - angle * 4
low portb.2
endif
''''''''''''''''servo4
'servo4:
if d[4] > 127 then
angle = d[4] - 128
high portb.3
pauseus 1500 + angle*4
low portb.3
endif
if d[4] < 128 then
angle = 127 - d[4]
high portb.3
pauseus 1500 - angle * 4
low portb.3
endif
''''''''''''''''servo5
'servo5:
if d[5] > 127 then
angle = d[5] - 128
high portb.4
pauseus 1500 + angle*4
low portb.4
endif
if d[5] < 128 then
angle = 127 - d[5]
high portb.4
pauseus 1500 - angle * 4
low portb.4
endif
''''''''''''''''servo6
'servo6:
if d[6] > 127 then
angle = d[6] - 128
high portb.5
pauseus 1500 + angle*4
low portb.5
endif
if d[6] < 128 then
angle = 127 - d[6]
high portb.5
pauseus 1500 - angle * 4
low portb.5
endif
''''''''''''''''servo7
'servo7:
if d[7] > 127 then
angle = d[7] - 128
high portb.6
pauseus 1500 + angle*4
low portb.6
endif
if d[7] < 128 then
angle = 127 - d[7]
high portb.6
pauseus 1500 - angle * 4
low portb.6
endif
''''''''''''''''servo8
'servo8:
if d[8] > 127 then
angle = d[8] - 128
high portb.7
pauseus 1500 + angle*4
low portb.7
endif
if d[8] < 128 then
angle = 127 - d[8]
high portb.7
pauseus 1500 - angle * 4
low portb.7
endif
goto main
هنا https://ec23.blogspot.com/2009/01/blog-post.html ممكن تقولوا لى ايه الحل فى مشكلة رفع الصور فى المنتدى  
|
||
|
|
|
21-10-2009,
05:28 PM
|
مشاركة [ 8 ] | |||
|
||||
|
|
ممكن تقولوا لى ايه الحل فى مشكلة رفع الصور فى المنتدى
خربان مركز رفع الصور في هذا المنتدى . استخدم اي واحد اخر . تمنياتي لكم بالتوفيق والنجاح |
|||
|
|
|
21-10-2009,
06:42 PM
|
مشاركة [ 9 ] | |||
|
||||
|
|
شكرا يا اخي على الاجابة السريعة .....
اتمنى منك المزيد...... |
|||
|
|
|
21-10-2009,
08:54 PM
|
مشاركة [ 10 ] | |||
|
||||
  |
ما شاء الله عليك يا اخى و الله الفكره حلوه بس لو تفسر لنا اكثر فى الدائره و تتعمق اكثر فى الموضوع و تشرح طريقه البناءخطوه خطوه يكون لك جزيل الشكر
|
|||
|
|
|
21-10-2009,
09:32 PM
|
مشاركة [ 11 ] | ||
|
|||
|
|
والله الفكرة اكتر من رائعة لكن لو سمحت يا اخي تشرحها بطرقة مفصلة ويعني ياريت لو خطوة خطوة
الله يبارك فيك |
||
|
|
|
21-10-2009,
09:44 PM
|
مشاركة [ 12 ] | ||
|
|||
|
|
ان شاء الله سوف اجهز شرح وافى للمشروع خطوة خطوة واوضح كفية العمل وارفع الملف فى المنتدى قريبا
هل الصور ظاهرة ؟ |
||
|
|
|
21-10-2009,
10:14 PM
|
مشاركة [ 13 ] | |||
|
||||
|
|
ان شاء الله سوف اجهز شرح وافى للمشروع خطوة خطوة واوضح كفية العمل وارفع الملف فى المنتدى قريبا هل الصور ظاهرة ؟ اتمنى لك التوفيق اخوي ... الصور التي في المشاركه رقم 3 غير ظاهرة . تمنياتي لكم بالتوفيق والنجاح |
|||
|
|
|
22-10-2009,
09:14 AM
|
مشاركة [ 14 ] | ||
|
|||
|
|
مانوع الاسبيد كنترولر الزى تستخدمة ؟؟ مانوع المايكروكنترولر الذى تجيد التعامل معة ؟ هل عندما صممت الدائرة كانت السيرفوهات ثابتة فى الحركة ام مهتزة ؟ لان معظم الاسبيد كنترولر ماتقبل الاشارة الغير ثابتة وماتشتغل اذا كانت اشارة التحكم لها عرض نبضة اكبر من 1 ملى ثانية عند بداء التشغيل باعتبار ان عصى الثروتيل مرفوعة الكود التالى هو كود لقيادة 8 سيرفوهات عن طريق المعالج pic16f77a يستم استقبال القيم عن طريق منفز ار اس 232 للمايكرو الكود مكتوب بلغة البيك بيزك برو دا تقريبا اول كود اكتبه متعلق بقيادة السيرفوهات كود:
'****************************************************************
'* Name : UNTITLED.BAS *
'* Author : [eng . Mohammad Alamin Ali] *
'* Notice : Copyright (c) 2008 [select VIEW...EDITOR OPTIONS] *
'* : All Rights Reserved *
'* Date : 1/23/2008 *
'* Version : 1.0 *
'* Notes : *
'* : *
'****************************************************************
define osc 12
include "modedefs.bas"
value var byte
angle var byte
d var byte [16]
trisd = $00
' INTCON = %00100001
' OPTION_REG = %11100000
' TMR0 = 0
' on interrupt goto ISR
' INTCON = %11000000
main:
serin2 portc.1 , 84 , [WAIT($A6 ,$41), str d\16 ]
' if d[0] = $C6 then
portd = d[9]
'servo1:
if d[1] > 127 then
angle = d[1] - 128
high portb.0
pauseus 1500 + angle*4
low portb.0
endif
if d[1] < 128 then
angle = 127 - d[1]
high portb.0
pauseus 1500 - angle * 4
low portb.0
endif
''''''''''''''''servo2
'servo2:
if d[2] > 127 then
angle = d[2] - 128
high portb.1
pauseus 1500 + angle*4
low portb.1
endif
if d[2] < 128 then
angle = 127 - d[2]
high portb.1
pauseus 1500 - angle * 4
low portb.1
endif
''''''''''''''''servo3
'servo3:
if d[3] > 127 then
angle = d[3] - 128
high portb.2
pauseus 1500 + angle*4
low portb.2
endif
if d[3] < 128 then
angle = 127 - d[3]
high portb.2
pauseus 1500 - angle * 4
low portb.2
endif
''''''''''''''''servo4
'servo4:
if d[4] > 127 then
angle = d[4] - 128
high portb.3
pauseus 1500 + angle*4
low portb.3
endif
if d[4] < 128 then
angle = 127 - d[4]
high portb.3
pauseus 1500 - angle * 4
low portb.3
endif
''''''''''''''''servo5
'servo5:
if d[5] > 127 then
angle = d[5] - 128
high portb.4
pauseus 1500 + angle*4
low portb.4
endif
if d[5] < 128 then
angle = 127 - d[5]
high portb.4
pauseus 1500 - angle * 4
low portb.4
endif
''''''''''''''''servo6
'servo6:
if d[6] > 127 then
angle = d[6] - 128
high portb.5
pauseus 1500 + angle*4
low portb.5
endif
if d[6] < 128 then
angle = 127 - d[6]
high portb.5
pauseus 1500 - angle * 4
low portb.5
endif
''''''''''''''''servo7
'servo7:
if d[7] > 127 then
angle = d[7] - 128
high portb.6
pauseus 1500 + angle*4
low portb.6
endif
if d[7] < 128 then
angle = 127 - d[7]
high portb.6
pauseus 1500 - angle * 4
low portb.6
endif
''''''''''''''''servo8
'servo8:
if d[8] > 127 then
angle = d[8] - 128
high portb.7
pauseus 1500 + angle*4
low portb.7
endif
if d[8] < 128 then
angle = 127 - d[8]
high portb.7
pauseus 1500 - angle * 4
low portb.7
endif
goto main
هنا https://ec23.blogspot.com/2009/01/blog-post.html ممكن تقولوا لى ايه الحل فى مشكلة رفع الصور فى المنتدى
مشكور أخي الغالي جزاك الله خيراً ووفقك لكل خير افضل واجيد التعامل PIC عامة لكن ممكن الكود بالاسمبلي ان سمحت واذا سمحت ممكن شرح للاشارة الخاصة بذلك هل هي مجرد نبضات 1 ميكرو فقط دون تمهيد للاقلاع بالمحرك والواحد ميكرو هل هو طول النبضة ON ام هو ON مع OFF وهل يوجد نسبة خطأ مسموحة من هذه الصورة ممكن توضح كم يجب ان يكون الزمن من A-B ومن A-C بالنسبة للرسم الأول الذي يمثل السرعة الدنيا والثاني الذي يمثل السرعة القصوى  الف شكر مرة أخرى |
||
|
|
|
22-10-2009,
04:20 PM
|
مشاركة [ 15 ] | ||
|
|||
|
|
الاشارة لها اقل قيمة تساوى 1 ملى ثانية (ليس مايكرو) واعلى قيمة تكون 2 ملى ثانية حتى تستطيع التحكم بالسيرفوا و الاسبيد كترولر
بالنسبة للسيرفو 1.5 هى نقطة المنتصف 2 ملى ثانية اعلى قيمة للزاوية و 1ملى ثانية هى اعلى قيمة للزاوية فى الاتجاة المعاكس بالنسبة للسبيد كنترولر 1 ملى ثانية يكون الموتور لايعمل وتزيد سرعة الموتور بزيادة عرض النبضة حتى تصل الى 2 ملى ثانية تكون اقصى سرعة ملحوظة مهمة عند استخدام اسبيد كنترولر لازم تبداء الاشارة عند التشغيل من 1m sec عدى ذلك لن يشتغل هذه العملية للحماية معظم الاسبيد كنترولر تعمل بنفس المبداء ----------------------------------- يتم حساب الجزء مرتفع الجهد من النبضة الجزء كما فى الرسم من A to B هو المهم الجزء BC ليس حساس يمكن ان يكون اى قيمة حسب تجربتى ----------------------------------- بالنسبة للاخطاء اذا كانت مسموحة ام لا (سوف تلاحظ ذلك فى حركة السيرفو ) اذا لم يكن الاداء ثابت وسريع معناها فى عدم استقرار فى الاشارة ------------------------------------ اذا كانت الاشارة لها عرض نبضة اكبر من 2 ملى ثانية سوف يتحرك السيرفوو الى اقل زاوية كما لو كانت الاشارة تساوى 1 ملى ثانية ------------------------------------ تردد الاشارة يفضل ان يكون 50 هيرتز يجب ان تعيد الاشارة نفسها كل 18 ملى ثانية ----------------------------------- حسب ماطلبت هذا هو كود الاسمبلى كود:
PM_USED EQU 1 INCLUDE "16F84A.INC" ; Define statements. #define osc 12 RAM_START EQU 0000Ch RAM_END EQU 0004Fh RAM_BANKS EQU 00001h BANK0_START EQU 0000Ch BANK0_END EQU 0004Fh EEPROM_START EQU 02100h EEPROM_END EQU 0213Fh R0 EQU RAM_START + 000h R1 EQU RAM_START + 002h R2 EQU RAM_START + 004h R3 EQU RAM_START + 006h R4 EQU RAM_START + 008h R5 EQU RAM_START + 00Ah R6 EQU RAM_START + 00Ch R7 EQU RAM_START + 00Eh R8 EQU RAM_START + 010h T1 EQU RAM_START + 012h FLAGS EQU RAM_START + 014h GOP EQU RAM_START + 015h RM1 EQU RAM_START + 016h RM2 EQU RAM_START + 017h RR1 EQU RAM_START + 018h RR2 EQU RAM_START + 019h _d EQU RAM_START + 01Ah _angle EQU RAM_START + 02Ah _value EQU RAM_START + 02Bh _PORTL EQU PORTB _PORTH EQU PORTA _TRISL EQU TRISB _TRISH EQU TRISA #define _PORTC_1 PORTC, 001h #define _PORTB_0 PORTB, 000h #define _PORTB_1 PORTB, 001h #define _PORTB_2 PORTB, 002h #define _PORTB_3 PORTB, 003h #define _PORTB_4 PORTB, 004h #define _PORTB_5 PORTB, 005h #define _PORTB_6 PORTB, 006h #define _PORTB_7 PORTB, 007h ; Constants. _T2400 EQU 00000h _T1200 EQU 00001h _T9600 EQU 00002h _T300 EQU 00003h _N2400 EQU 00004h _N1200 EQU 00005h _N9600 EQU 00006h _N300 EQU 00007h _OT2400 EQU 00008h _OT1200 EQU 00009h _OT9600 EQU 0000Ah _OT300 EQU 0000Bh _ON2400 EQU 0000Ch _ON1200 EQU 0000Dh _ON9600 EQU 0000Eh _ON300 EQU 0000Fh _MSBPRE EQU 00000h _LSBPRE EQU 00001h _MSBPOST EQU 00002h _LSBPOST EQU 00003h _LSBFIRST EQU 00000h _MSBFIRST EQU 00001h _CLS EQU 00000h _HOME EQU 00001h _BELL EQU 00007h _BKSP EQU 00008h _TAB EQU 00009h _CR EQU 0000Dh _UnitOn EQU 00012h _UnitOff EQU 0001Ah _UnitsOff EQU 0001Ch _LightsOn EQU 00014h _LightsOff EQU 00010h _Dim EQU 0001Eh _Bright EQU 00016h INCLUDE "SERVO-~1.MAC" INCLUDE "PBPPIC14.LIB" MOVE?CB 000h, TRISD LABEL?L _main SERIN2DPIN?T _PORTC_1 SERIN2MODE?C 054h LABEL?L L00001 SERIN2WAIT?CL 0A6h, L00001 SERIN2WAIT?CL 041h, L00001 SERIN2COUNT?C 010h SERIN2STR?B _d MOVE?BB _d + 00009h, PORTD CMPLE?BCL _d + 00001h, 07Fh, L00002 SUB?BCB _d + 00001h, 080h, _angle HIGH?T _PORTB_0 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_0 LABEL?L L00002 CMPGE?BCL _d + 00001h, 080h, L00004 SUB?CBB 07Fh, _d + 00001h, _angle HIGH?T _PORTB_0 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_0 LABEL?L L00004 CMPLE?BCL _d + 00002h, 07Fh, L00006 SUB?BCB _d + 00002h, 080h, _angle HIGH?T _PORTB_1 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_1 LABEL?L L00006 CMPGE?BCL _d + 00002h, 080h, L00008 SUB?CBB 07Fh, _d + 00002h, _angle HIGH?T _PORTB_1 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_1 LABEL?L L00008 CMPLE?BCL _d + 00003h, 07Fh, L00010 SUB?BCB _d + 00003h, 080h, _angle HIGH?T _PORTB_2 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_2 LABEL?L L00010 CMPGE?BCL _d + 00003h, 080h, L00012 SUB?CBB 07Fh, _d + 00003h, _angle HIGH?T _PORTB_2 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_2 LABEL?L L00012 CMPLE?BCL _d + 00004h, 07Fh, L00014 SUB?BCB _d + 00004h, 080h, _angle HIGH?T _PORTB_3 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_3 LABEL?L L00014 CMPGE?BCL _d + 00004h, 080h, L00016 SUB?CBB 07Fh, _d + 00004h, _angle HIGH?T _PORTB_3 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_3 LABEL?L L00016 CMPLE?BCL _d + 00005h, 07Fh, L00018 SUB?BCB _d + 00005h, 080h, _angle HIGH?T _PORTB_4 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_4 LABEL?L L00018 CMPGE?BCL _d + 00005h, 080h, L0**** SUB?CBB 07Fh, _d + 00005h, _angle HIGH?T _PORTB_4 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_4 LABEL?L L0**** CMPLE?BCL _d + 00006h, 07Fh, L00022 SUB?BCB _d + 00006h, 080h, _angle HIGH?T _PORTB_5 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_5 LABEL?L L00022 CMPGE?BCL _d + 00006h, 080h, L00024 SUB?CBB 07Fh, _d + 00006h, _angle HIGH?T _PORTB_5 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_5 LABEL?L L00024 CMPLE?BCL _d + 00007h, 07Fh, L00026 SUB?BCB _d + 00007h, 080h, _angle HIGH?T _PORTB_6 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_6 LABEL?L L00026 CMPGE?BCL _d + 00007h, 080h, L00028 SUB?CBB 07Fh, _d + 00007h, _angle HIGH?T _PORTB_6 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_6 LABEL?L L00028 CMPLE?BCL _d + 00008h, 07Fh, L00030 SUB?BCB _d + 00008h, 080h, _angle HIGH?T _PORTB_7 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_7 LABEL?L L00030 CMPGE?BCL _d + 00008h, 080h, L00032 SUB?CBB 07Fh, _d + 00008h, _angle HIGH?T _PORTB_7 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_7 LABEL?L L00032 GOTO?L _main END بالتوفيق اخى |
||
|
|
|
25-10-2009,
07:59 AM
|
مشاركة [ 16 ] | ||
|
|||
|
|
الاشارة لها اقل قيمة تساوى 1 ملى ثانية (ليس مايكرو) واعلى قيمة تكون 2 ملى ثانية حتى تستطيع التحكم بالسيرفوا و الاسبيد كترولر بالنسبة للسيرفو 1.5 هى نقطة المنتصف 2 ملى ثانية اعلى قيمة للزاوية و 1ملى ثانية هى اعلى قيمة للزاوية فى الاتجاة المعاكس بالنسبة للسبيد كنترولر 1 ملى ثانية يكون الموتور لايعمل وتزيد سرعة الموتور بزيادة عرض النبضة حتى تصل الى 2 ملى ثانية تكون اقصى سرعة ملحوظة مهمة عند استخدام اسبيد كنترولر لازم تبداء الاشارة عند التشغيل من 1m sec عدى ذلك لن يشتغل هذه العملية للحماية معظم الاسبيد كنترولر تعمل بنفس المبداء ----------------------------------- يتم حساب الجزء مرتفع الجهد من النبضة الجزء كما فى الرسم من A to B هو المهم الجزء BC ليس حساس يمكن ان يكون اى قيمة حسب تجربتى ----------------------------------- بالنسبة للاخطاء اذا كانت مسموحة ام لا (سوف تلاحظ ذلك فى حركة السيرفو ) اذا لم يكن الاداء ثابت وسريع معناها فى عدم استقرار فى الاشارة ------------------------------------ اذا كانت الاشارة لها عرض نبضة اكبر من 2 ملى ثانية سوف يتحرك السيرفوو الى اقل زاوية كما لو كانت الاشارة تساوى 1 ملى ثانية ------------------------------------ تردد الاشارة يفضل ان يكون 50 هيرتز يجب ان تعيد الاشارة نفسها كل 18 ملى ثانية ----------------------------------- حسب ماطلبت هذا هو كود الاسمبلى كود:
PM_USED EQU 1 INCLUDE "16F84A.INC" ; Define statements. #define osc 12 RAM_START EQU 0000Ch RAM_END EQU 0004Fh RAM_BANKS EQU 00001h BANK0_START EQU 0000Ch BANK0_END EQU 0004Fh EEPROM_START EQU 02100h EEPROM_END EQU 0213Fh R0 EQU RAM_START + 000h R1 EQU RAM_START + 002h R2 EQU RAM_START + 004h R3 EQU RAM_START + 006h R4 EQU RAM_START + 008h R5 EQU RAM_START + 00Ah R6 EQU RAM_START + 00Ch R7 EQU RAM_START + 00Eh R8 EQU RAM_START + 010h T1 EQU RAM_START + 012h FLAGS EQU RAM_START + 014h GOP EQU RAM_START + 015h RM1 EQU RAM_START + 016h RM2 EQU RAM_START + 017h RR1 EQU RAM_START + 018h RR2 EQU RAM_START + 019h _d EQU RAM_START + 01Ah _angle EQU RAM_START + 02Ah _value EQU RAM_START + 02Bh _PORTL EQU PORTB _PORTH EQU PORTA _TRISL EQU TRISB _TRISH EQU TRISA #define _PORTC_1 PORTC, 001h #define _PORTB_0 PORTB, 000h #define _PORTB_1 PORTB, 001h #define _PORTB_2 PORTB, 002h #define _PORTB_3 PORTB, 003h #define _PORTB_4 PORTB, 004h #define _PORTB_5 PORTB, 005h #define _PORTB_6 PORTB, 006h #define _PORTB_7 PORTB, 007h ; Constants. _T2400 EQU 00000h _T1200 EQU 00001h _T9600 EQU 00002h _T300 EQU 00003h _N2400 EQU 00004h _N1200 EQU 00005h _N9600 EQU 00006h _N300 EQU 00007h _OT2400 EQU 00008h _OT1200 EQU 00009h _OT9600 EQU 0000Ah _OT300 EQU 0000Bh _ON2400 EQU 0000Ch _ON1200 EQU 0000Dh _ON9600 EQU 0000Eh _ON300 EQU 0000Fh _MSBPRE EQU 00000h _LSBPRE EQU 00001h _MSBPOST EQU 00002h _LSBPOST EQU 00003h _LSBFIRST EQU 00000h _MSBFIRST EQU 00001h _CLS EQU 00000h _HOME EQU 00001h _BELL EQU 00007h _BKSP EQU 00008h _TAB EQU 00009h _CR EQU 0000Dh _UnitOn EQU 00012h _UnitOff EQU 0001Ah _UnitsOff EQU 0001Ch _LightsOn EQU 00014h _LightsOff EQU 00010h _Dim EQU 0001Eh _Bright EQU 00016h INCLUDE "SERVO-~1.MAC" INCLUDE "PBPPIC14.LIB" MOVE?CB 000h, TRISD LABEL?L _main SERIN2DPIN?T _PORTC_1 SERIN2MODE?C 054h LABEL?L L00001 SERIN2WAIT?CL 0A6h, L00001 SERIN2WAIT?CL 041h, L00001 SERIN2COUNT?C 010h SERIN2STR?B _d MOVE?BB _d + 00009h, PORTD CMPLE?BCL _d + 00001h, 07Fh, L00002 SUB?BCB _d + 00001h, 080h, _angle HIGH?T _PORTB_0 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_0 LABEL?L L00002 CMPGE?BCL _d + 00001h, 080h, L00004 SUB?CBB 07Fh, _d + 00001h, _angle HIGH?T _PORTB_0 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_0 LABEL?L L00004 CMPLE?BCL _d + 00002h, 07Fh, L00006 SUB?BCB _d + 00002h, 080h, _angle HIGH?T _PORTB_1 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_1 LABEL?L L00006 CMPGE?BCL _d + 00002h, 080h, L00008 SUB?CBB 07Fh, _d + 00002h, _angle HIGH?T _PORTB_1 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_1 LABEL?L L00008 CMPLE?BCL _d + 00003h, 07Fh, L00010 SUB?BCB _d + 00003h, 080h, _angle HIGH?T _PORTB_2 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_2 LABEL?L L00010 CMPGE?BCL _d + 00003h, 080h, L00012 SUB?CBB 07Fh, _d + 00003h, _angle HIGH?T _PORTB_2 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_2 LABEL?L L00012 CMPLE?BCL _d + 00004h, 07Fh, L00014 SUB?BCB _d + 00004h, 080h, _angle HIGH?T _PORTB_3 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_3 LABEL?L L00014 CMPGE?BCL _d + 00004h, 080h, L00016 SUB?CBB 07Fh, _d + 00004h, _angle HIGH?T _PORTB_3 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_3 LABEL?L L00016 CMPLE?BCL _d + 00005h, 07Fh, L00018 SUB?BCB _d + 00005h, 080h, _angle HIGH?T _PORTB_4 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_4 LABEL?L L00018 CMPGE?BCL _d + 00005h, 080h, L0**** SUB?CBB 07Fh, _d + 00005h, _angle HIGH?T _PORTB_4 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_4 LABEL?L L0**** CMPLE?BCL _d + 00006h, 07Fh, L00022 SUB?BCB _d + 00006h, 080h, _angle HIGH?T _PORTB_5 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_5 LABEL?L L00022 CMPGE?BCL _d + 00006h, 080h, L00024 SUB?CBB 07Fh, _d + 00006h, _angle HIGH?T _PORTB_5 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_5 LABEL?L L00024 CMPLE?BCL _d + 00007h, 07Fh, L00026 SUB?BCB _d + 00007h, 080h, _angle HIGH?T _PORTB_6 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_6 LABEL?L L00026 CMPGE?BCL _d + 00007h, 080h, L00028 SUB?CBB 07Fh, _d + 00007h, _angle HIGH?T _PORTB_6 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_6 LABEL?L L00028 CMPLE?BCL _d + 00008h, 07Fh, L00030 SUB?BCB _d + 00008h, 080h, _angle HIGH?T _PORTB_7 MUL?BCW _angle, 004h, T1 ADD?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_7 LABEL?L L00030 CMPGE?BCL _d + 00008h, 080h, L00032 SUB?CBB 07Fh, _d + 00008h, _angle HIGH?T _PORTB_7 MUL?BCW _angle, 004h, T1 SUB?CWW 005DCh, T1, T1 PAUSEUS?W T1 LOW?T _PORTB_7 LABEL?L L00032 GOTO?L _main END بالتوفيق اخى الف شكر لك اخي سأجرب وارد لك خبر |
||
|
|
|
25-10-2009,
06:59 PM
|
مشاركة [ 17 ] | |||
|
||||
|
|
و الله يا جماعه بس لو اعيد طرح الموضوع بشكل مرتب اكثر و اكثر ترتيبا و الله راح تكون الاستفاده اكبر
|
|||
|
|
|
26-10-2009,
12:31 AM
|
مشاركة [ 18 ] | |||
|
||||
|
|
ماشاء الله موفق
|
|||
|
|
|
26-07-2010,
02:18 PM
|
مشاركة [ 19 ] | ||
|
|||
|
|
وين بقيت الموضوع يا جماعة
ليش وقفتوا |
||
|
|
|
16-09-2010,
11:26 PM
|
مشاركة [ 20 ] | |||
|
||||
|
|
السلام عليكم ورحمت الله وبراكاته .
ايمكنكم اعطائي الدائرة الالكترونية لهدا الجهاز. وهل يمكنني ان استعمل هدا الجهاز في الطائرة دات التحكم عن بعد ادا كان ممكن هل يكن ان تعطوني اسم البرنامج المستعمل للطيار الالي. وشكرا لكم. |
|||
|
|
| موضوع مغلق |
 قسم الطيران اللاسلكي AIRCRAFT R/C
قسم الطيران اللاسلكي AIRCRAFT R/C
|
|
|
|
|
|
|
المواضيع المتشابهه
|
||||
| الموضوع | المنتدى | |||
| مساعدة في صنع جهاز تحكم عن بعد | قسم الطيران اللاسلكي AIRCRAFT R/C | |||
| أحتاج المساعدة في تصميم جهاز تحكم عن بعد لمجسم طائرة | قسم الطيران اللاسلكي AIRCRAFT R/C | |||

 اقتباس:
اقتباس: 




